The objective of this project was to develop a drone capable of detecting and avoiding obstacles. To achieve this, the method by which a bat senses its surroundings using echolocation has been replicated.
The designed drone integrates a set of sensors into the vehicle itself, capable of emitting ultrasound. When this ultrasound bounces off surrounding objects and the signal is received back, the drone calculates the distance to all nearby obstacles. When very close objects are detected, the detection system can communicate this to the drone so that it can change course and avoid them.
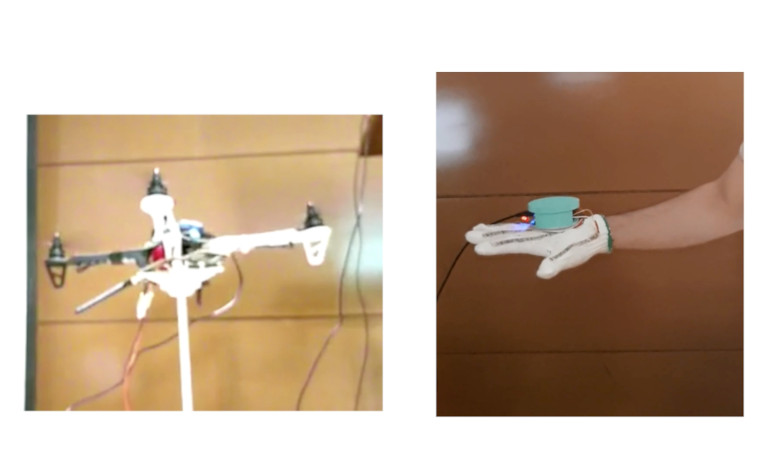
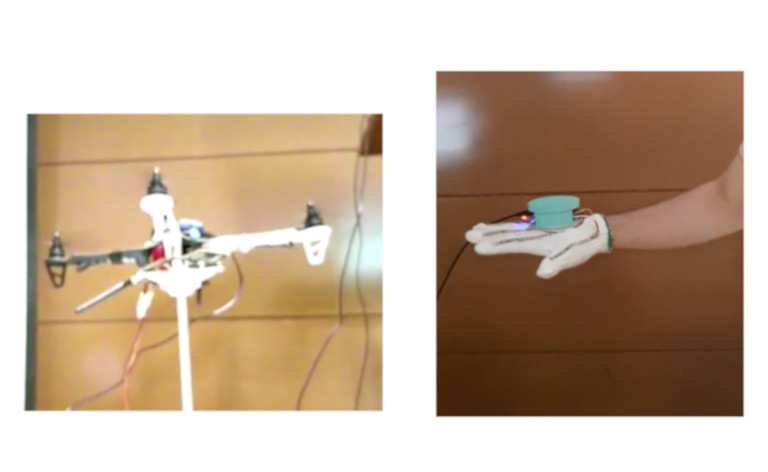
To control a drone with hand gestures, this project has designed a special glove with integrated sensors to measure hand tilt, movement speed, and even finger movements.
With these features, anyone can operate a drone without any additional controller; simply put the glove on and move your hand in the desired direction and speed.
Controlling a drone with your voice allows for a more intuitive and simpler operation of these aerial vehicles. Several challenges have been overcome in this project: long-distance communication, engine noise interference, identification of spoken commands, etc.
To enable communication with the drone over long distances while avoiding engine noise, a mobile phone application has been developed that can listen to the user's voice and identify the commands directed to the drone. This is achieved by integrating artificial intelligence techniques that recognize commands regardless of the person issuing them.
In this project, the mobile phone acts as an intermediary between the user and the drone, identifying spoken commands, transforming them into commands directed to the drone, and transmitting them wirelessly.
Environmental management with drones and ground beacons using a LoRa connection
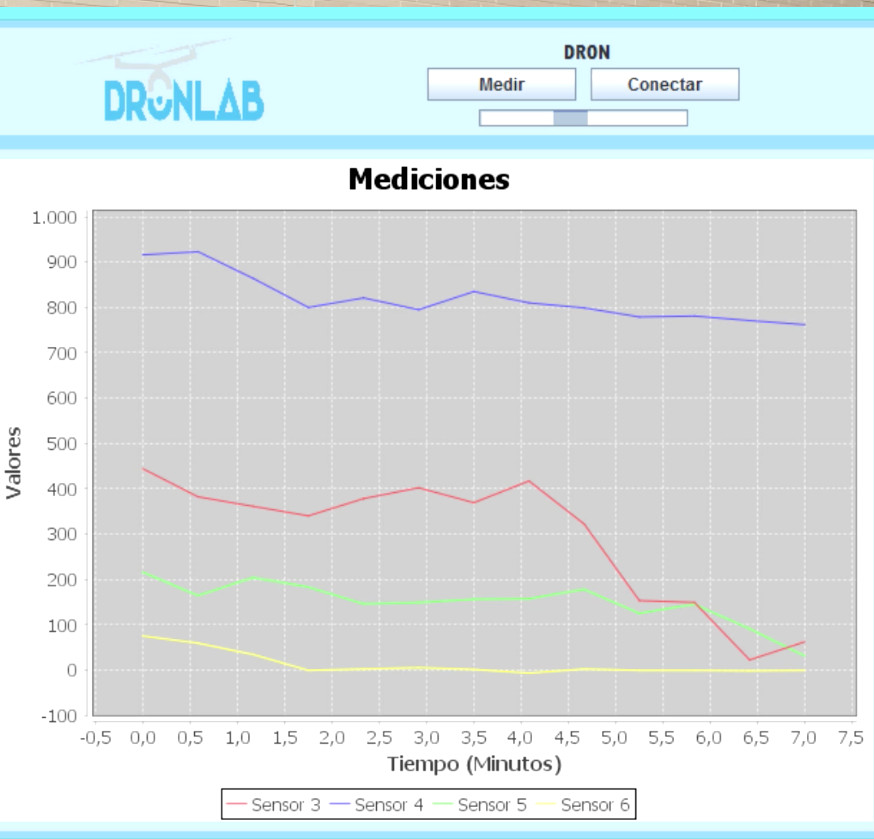
Placing different types of sensors in the field can provide valuable information about environmental conditions. Data such as temperature, humidity, gas detection, etc., can be used in precision agriculture, environmental, and even forestry applications.
However, these systems are not useful in remote or poorly covered areas, as they require a complex and expensive data transmission system. To address these issues, this project develops a communication system between drones and ground beacons that allows information to be transmitted between the two systems over distances of several kilometers using a LoRa communication system.
Augmented reality is a technology that overlays virtual data onto the real world, enriching the user's perception without replacing the physical environment. The purpose of this project was to develop an augmented reality-based system to monitor and control a drone using virtual reality glasses. The following tasks were carried out to develop this project:
An embedded system based on a Raspberry Pi was integrated into the drone to send video images.
A virtual application was programmed in Unity and C# to receive the video and display it in a virtual component.
A speech recognition system was implemented in Unity.
A communication system was developed with the drone to send commands and receive the vehicle's status.
TERRAIN ELEVATION MEASUREMENT SYSTEM USING DRONES, RTK POSITIONING AND LIDAR
The main objective of this project is to develop a system that facilitates obtaining the coordinates of a point on the ground. To achieve this, a positioning system has been integrated into a drone. This system combines real-time RTK (Real-Time Kinematic) position and altitude data from the drone with data from a laser sensor that measures the drone's distance from the ground. The combination of these two datasets will allow the real-world coordinates of a point on the ground to be obtained.
This project consists of a system capable of obtaining terrain elevations from a high-precision positioning system integrated into the drone. This system receives corrections from the REP antenna network and a laser sensor that measures the drone's distance from the ground, thus obtaining elevations with centimeter-level accuracy.
CONTROL A DRONE OVER LONG DISTANCES WITH A 4G CONNECTION
This work develops a system for controlling the flight of a drone using mobile phone communication networks, performing real-time data transmission for state control and reception between an Android smartphone and a UAV (Unmanned Aerial Vehicle) using 4G networks.
The main objective of this project is therefore to develop a system that allows a drone to be controlled regardless of its location in the world, as long as it has 4G coverage.
This method proposes a heterogeneous network environment for real-time control and data acquisition at much greater distances than those commonly used, as well as the multiple applications that can be applied in the current landscape.
INTEGRATION OF AN ELECTRONIC ARRAY INTO A DRONE TO MONITOR AIR QUALITY
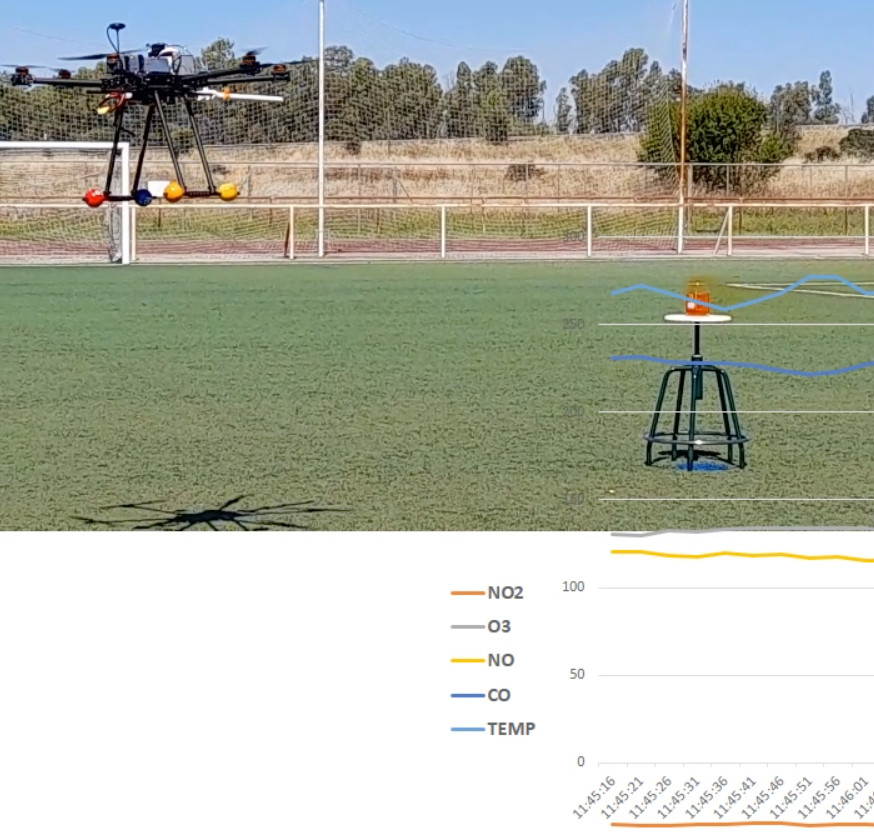
This work proposes an air quality measurement system integrated onboard an aerial vehicle. Specifically, the system is capable of measuring pollution levels of NO2, CO, O3, and NO. It also includes temperature and humidity measurements.
An air sampling system has been designed to avoid false readings due to the downwash effect. The air quality measurement system is based on electrochemical sensors. Therefore, it has been previously calibrated in the field using multilinear regression techniques.
Data transmission is performed wirelessly in real time using ZigBee. Furthermore, the data is stored locally in case wireless communication is not possible. Finally, a flight test was conducted to verify the correct operation of the system. A stable signal is achieved regardless of the drone's flight path. Additionally, it is also possible to detect a source of NO2.
HYDRON: HIGH-ALTITUDE CLEANING SYSTEM USING DRONES
First Prize ACCESSING 2024
Award for the best project in
UNIVERSAL ACCESSIBILITY
AND DESIGN FOR ALL
Currently, facade cleaning presents a constant challenge for the construction and maintenance industry. However, this approach has several inherent limitations and risks. Working at heights carries significant dangers to worker safety, including the risk of falls and serious injuries.
Furthermore, accessing hard-to-reach areas, such as those located high atop skyscrapers or on complexly designed structures, can be extremely dangerous.
Given this situation, there is a need to explore new technological solutions that can improve the efficiency, safety, and accessibility of facade cleaning processes. The main objective of this project is to design and implement a small-scale, drone-based cleaning system that uses low-pressure water to improve the efficiency and safety of facade maintenance.
First Prize ACCESSING 2024
Award for the best project in
UNIVERSAL ACCESSIBILITY
AND DESIGN FOR ALL
The main objective of the project is the development of an open-source software tool that allows for the reliable and easy-to-use control of a drone swarm.
The following conclusions can be drawn:
Connecting multiple drones to the same network, allowing the identification of each one and the reception of its status, has been achieved.
Control of multiple drones simultaneously from a remote computer has been achieved, comparing their positions and movements.
The drones in the swarm have been successfully controlled both independently and in a group.
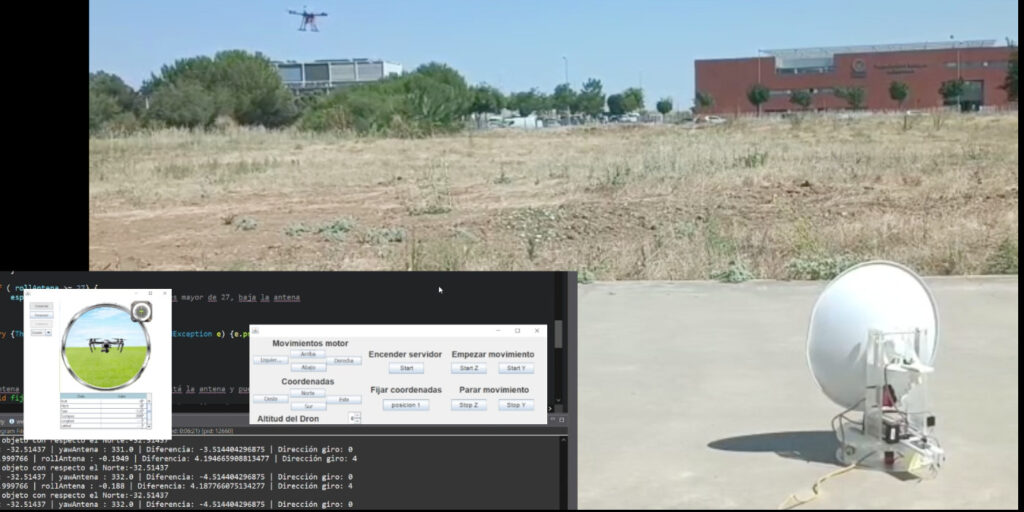
In recent years, the use of drones has become significantly more widespread in various fields such as agriculture, surveillance, industrial inspection, aerial photography, search and rescue, and mapping. However, one of the main technical limitations restricting their practical application is the communication range between the drone and the ground control station. In low-cost systems, communication is usually established using 2.4 GHz WiFi or limited telemetry links.
This work develops an antenna tracking system that allows communication with the drone up to 50 km. The antenna automatically orients itself with the drone to ensure stable communication at all times. The system maintains optimal alignment between the antenna and the moving vehicle, maximizing signal quality and minimizing communication losses.
The objective of this work has been to develop a voice-controlled home automation assistance system for managing the various home automation services in a laboratory. To achieve this, the following tasks have been carried out:
Implementation of an offline Spanish voice recognition system .
Installation and programming of wireless systems that serve as actuators for the different elements to be controlled.
Construction of a remote video surveillance system that can be voice-controlled and allows remote viewing of what is happening in the laboratory.
The main objective of this project is to develop a functional and cost-effective 3D scanner. To achieve this objective, the following secondary objectives have been proposed:
Study the operation of the RPLIDAR device, including its communication protocol
Design and build the physical mechanism in 3D
Develop the electronics: configure the electronic components, make the connections between them, and provide power to the system.
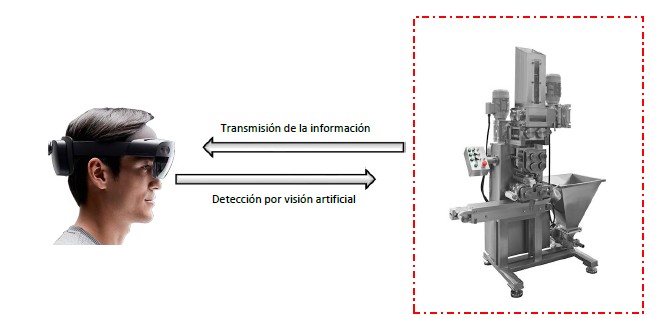
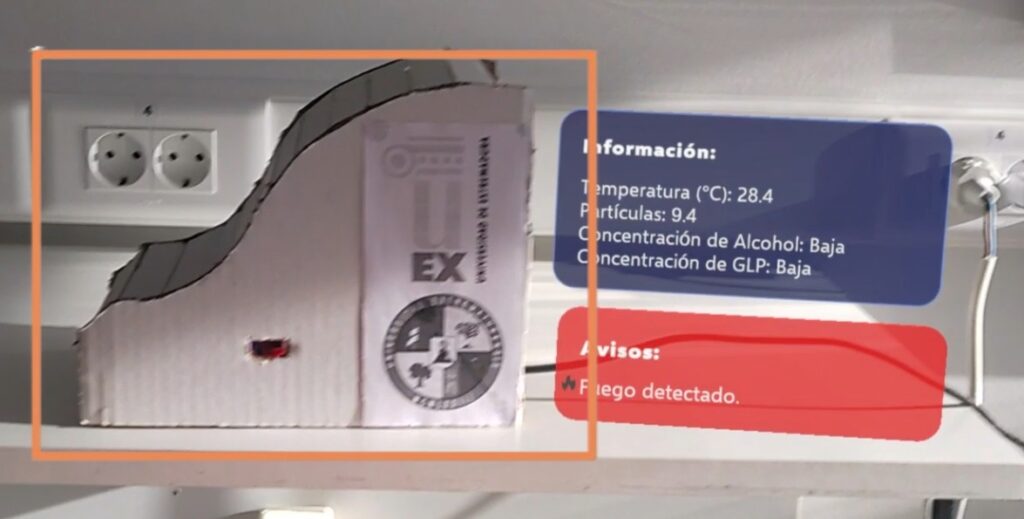
The main objective of this work is to develop a monitoring and control system for an industrial environment using mixed reality. For the development of the system, this work aims to achieve the following additional objectives:
• Develop a program for the simulation of an industrial process.
• Efficiently process the data supplied by the industrial environment.
• Design, develop, and implement communication protocols between the developed device and the industrial environment.
• Develop a graphical interface in a virtual environment where all the data from the industrial environment can be monitored.
Second prize ACCESSING 2025
Award for the best project in
UNIVERSAL ACCESSIBILITY
AND DESIGN FOR ALL
Conventional rescue methods are fundamental tools that have been used for decades for rescues in aquatic emergencies.
However, when conditions are adverse or the location of the person in danger is difficult to access, the rescue task becomes very complicated and can even endanger the lives of the rescuers.
To solve these problems, this project has developed a rescue system that allows a lifebuoy to be operated remotely. This innovative system will allow for the rescue of people at risk of drowning and can be used in situations where current rescue systems cannot be used.
Machine recognition and monitoring system using mixed reality glasses
This project represents a convergence of computer vision, mixed reality, and real-time processing, offering an innovative tool that leverages mixed reality devices for object detection and visualization in the immediate environment.
Continuous monitoring of critical variables allows for the anticipation of anomalies, highlighting potential trends of wear or overload. In terms of security, the system acts as a proactive assistant: it issues visual and audible alerts if established thresholds are exceeded, thus creating a safer and more controlled work environment.
FACIAL RECOGNITION SYSTEM FOR AUTOMATIC DOOR OPENING
First Prize ACCESSING 2025
Award for the best project in
UNIVERSAL ACCESSIBILITY
AND DESIGN FOR ALL
The ability to select individuals granted access to a home simply by reading their face improves security by reducing risks such as theft or loss of keys or the use of compromised passwords, thus eliminating human error.
The main objective of this work is the development of a software and hardware system that allows access to a room using facial recognition techniques. To develop this system, a program has been created to recognize people's faces.