El objetivo de este proyecto ha sido desarrollar un dron capaz de detectar y evitar obstáculos. Para ello, se ha reproducido la manera que tiene un murciélago de saber qué objetos hay a su alrededor usando la ecolocalización.
El dron diseñado integra en el propio vehículo un conjunto de sensores capaces de emitir un ultrasonido que al rebotar en los objetos circundantes, y recibir de nuevo la señal, permite calcular la distancia de todos los obstáculos que haya en las proximidades. Cuando se detectan objetos muy próximos, el sistema de detección es capaz de comunicárselo al dron para que éste pueda variar su rumbo y evitarlo.
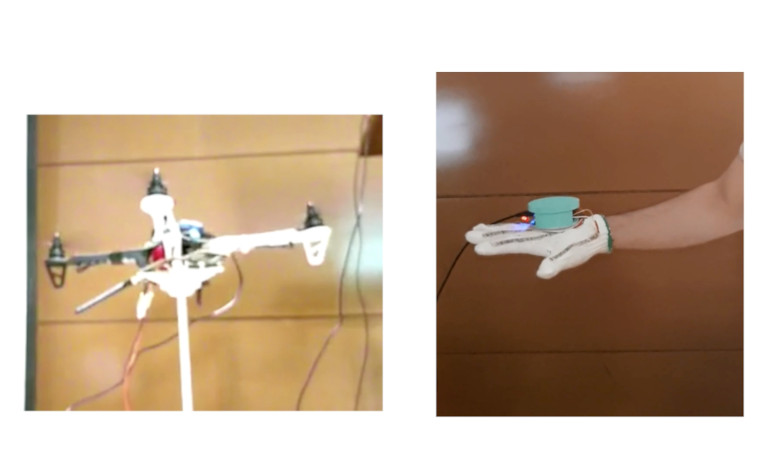
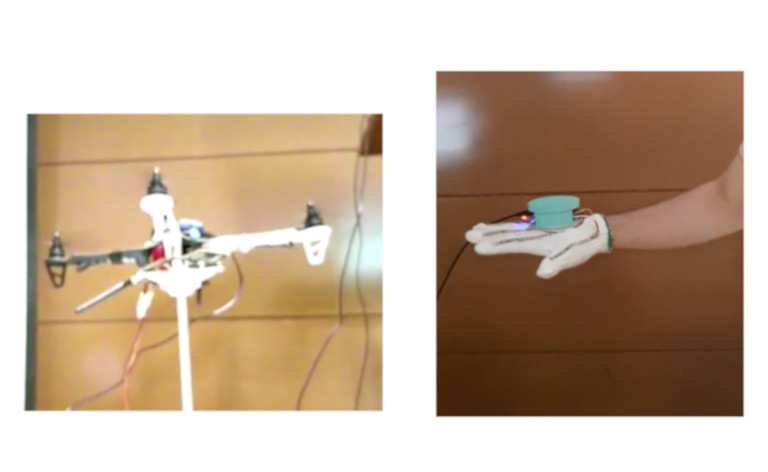
Para controlar un dron con los gestos de la mano este proyecto ha diseñado un guante especial en el que se han integrado una serie de sensores para medir el grado de inclinación de la mano, la velocidad del movimiento e incluso sensores capaces de detectar el movimiento de los dedos.
Con todos estos elementos, cualquier persona puede manejar un dron sin necesidad de utilizar ningún mando adicional, simplemente se debe colocar el guante en la mano y moverla según la dirección y velocidad en la que quiera dirigir el dron.
Controlar un dron por medio de la voz permite manejar de una manera más intuitiva y sencilla este tipo de vehículos aéreos. Varios retos se han solucionado en este proyecto: comunicación a largas distancias, interferencias del ruido del motor, identificación de órdenes habladas, etc.
Para poder hablar con el dron a largas distancias evitando el ruido de los motores, se ha desarrollado una aplicación en un teléfono móvil que es capaz de escuchar la voz del usuario e identificar las órdenes dirigidas al dron. Para ello, se han integrado técnicas de inteligencia artificial que reconocen las órdenes independientemente de la personas que las emite.
En este proyecto, el teléfono móvil actúa como intermediario entre la persona y el dron y permite identificar las órdenes habladas, transformarlas en órdenes dirigidas al dron y enviárselas a través de una comunicación inalámbrica.
Gestión del entorno con drones y balizas terrestres y usando una conexión LORA
Colocar diferentes tipos de sensores en el terreno puede ofrecer información muy importante sobre las condiciones ambientales. Datos como la temperatura, humedad, detección de gases, etc, pueden utilizarse tanto en aplicaciones para la agricultura de precisión, como medioambientales o incluso forestales.
Sin embargo, este tipo de sistemas no son útiles en lugares remotos o de escasa cobertura, ya que requieren un sistema de transmisión de datos complejo y muy caro.
Para solucionar estos problemas, este proyecto desarrolla un sistema de comunicación entre drones y balizas terrestres que permite transmitir información entre ambos sistemas a varios kilómetros de distancia usando para ello un sistema de comunicación LORA.
CONTROL DE UN DRON CON UNAS GAFAS DE REALIDAD VIRTUAL
La realidad aumentada es una tecnología que superpone datos virtuales sobre el mundo real, enriqueciendo la percepción del usuario sin reemplazar el entorno físico. El propósito de este proyecto ha sido desarrollar un sistema basado en realidad aumentada para monitorizar y controlar un dron a través de unas gafas virtuales. Para desarrollar este proyecto se han desarrollado las siguientes tareas:
Se ha integrado en el dron sistema embebido basado en una Raspberry Pi encargada de enviar las imágenes de video.
Se ha programado en Unity y C# una aplicación virtual que recibe el video y lo muestra en un componente virtual .
Se ha implementado un sistema de reconocimiento del habla en Unity
Se ha desarrollado un sistema de comunicación con el dron para enviar órdenes y recibir el estado del vehículo
SISTEMA DE MEDICIÓN DE COTAS DEL TERRENO USANDO DRONES, POSICIONAMIENTO RTK Y LIDAR
El objetivo principal de este proyecto es desarrollar un sistema que facilite la obtención de las coordenadas de una cota sobre el terreno. Para ello, se ha integrado en un dron un de sistema de posicionamiento que combina los datos RTK de posición y altitud del dron en tiempo real con los datos de un sensor láser encargado de medir la distancia del dron al suelo. La combinación de ambos datos permitirá obtener las coordenadas reales de un punto sobre el terreno.
Para desarrollar todo este proyecto, se ha utilizado la Red Extremeña de Posicionamiento de la Junta de Extremadura. Un proyecto que se inicia en el año 2008 por parte de la Dirección General de Urbanismo y Ordenación del Territorio perteneciente a la Consejería de Medio Ambiente y Rural, Políticas Agrarias y Territorio de la Junta de Extremadura. Entra en funcionamiento a principios de 2010 con un convenio de colaboración con la Universidad de Extremadura para su mantenimiento.
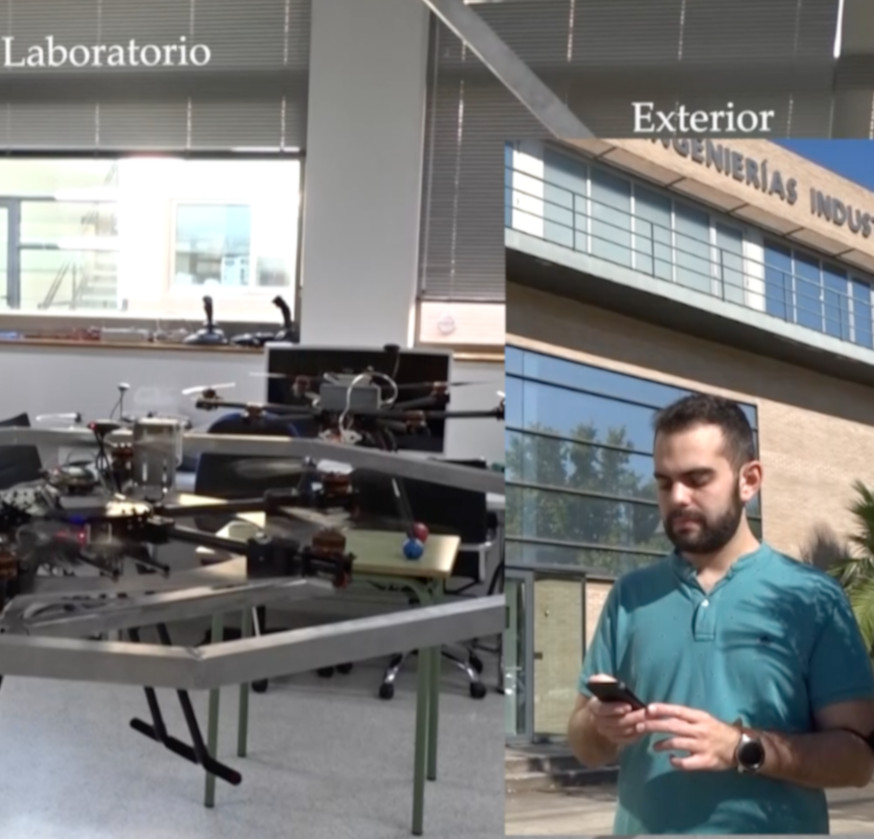
CONTROL DE UN DRON A GRANDES DISTANCIAS CON UNA CONEXIÓN 4G
El presente trabajo desarrolla un sistema para el control del vuelo de un dron mediante redes de comunicación de telefonía móvil, realizando una transmisión de datos en tiempo real para el control y recepción de estados entre un smartphone Android y un UAV (Unmanned Aerial Vehicle) mediante el uso de redes 4G.
El objetivo principal de este proyecto, es por tanto desarrollar un sistema que permita controlar un dron independientemente del lugar del mundo donde se encuentre, siempre y cundo, tenga cobertura 4G.
Este método propone un entorno de red heterogéneo para el control y toma de datos en tiempo real a distancias mucho mayores que las comúnmente utilizadas, así como las múltiples aplicaciones que pueden aplicarse en el panorama actual en el que vivimos.
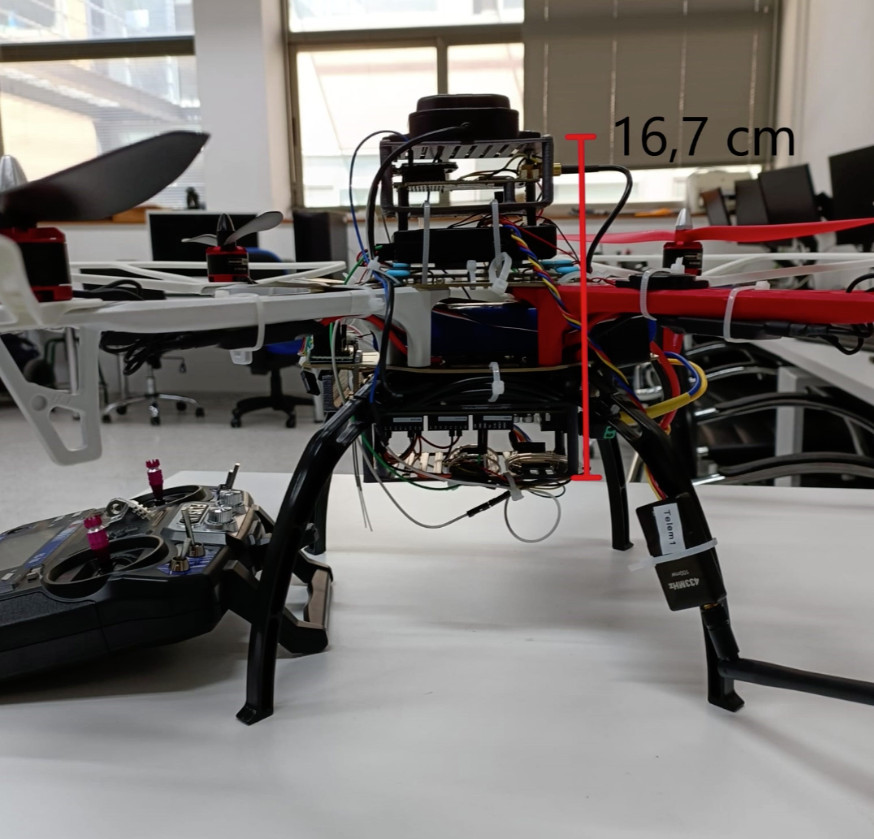
INTEGRACIÓN DE UNA NATRIZ ELECTRÓNICA EN UN DRON PARA MONITORIZAR LA CALIDAD DEL AIRE
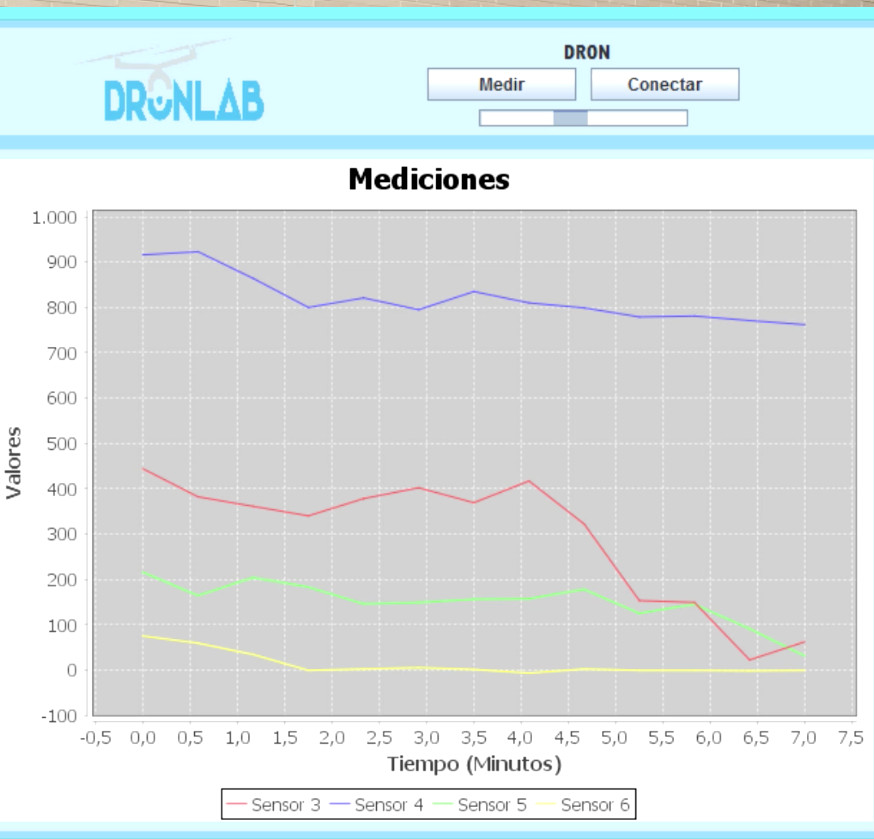
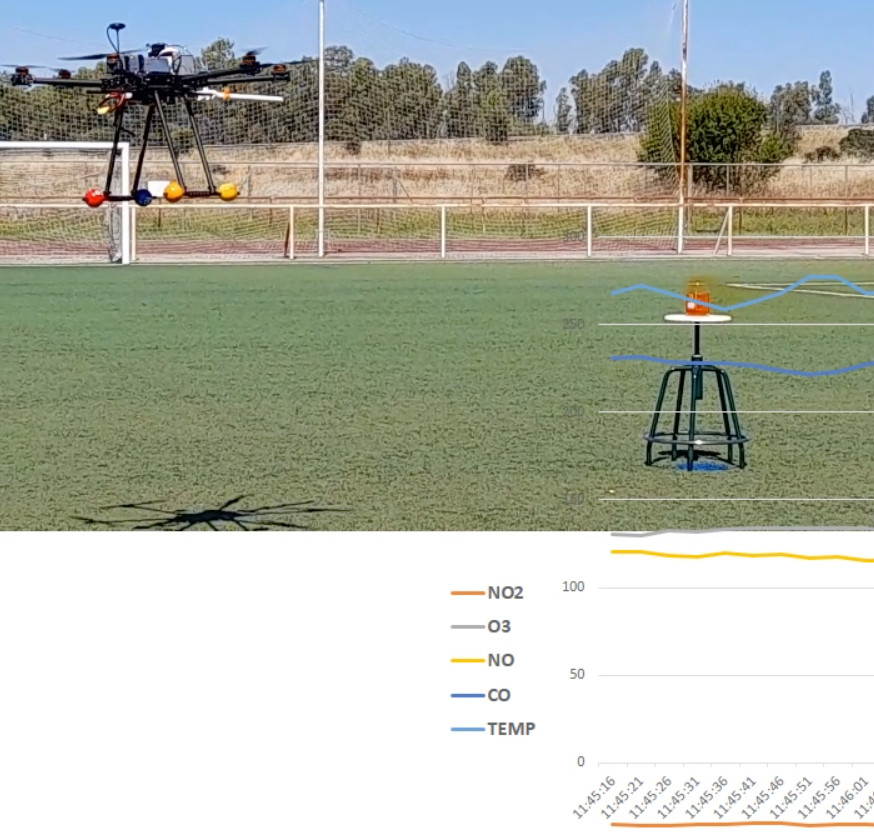
Este trabajo propone un sistema de medición de la calidad del aire integrado a bordo de un vehículo aéreo. En concreto, el sistema es capaz de medir los niveles de contaminación de NO2, CO, O3 y NO. Además, también incluye mediciones de temperatura y humedad.
Se ha diseñado un sistema de muestreo de aire para evitar lecturas falsas debido al efecto downwash. El sistema de medición de la calidad del aire se basa en sensores electroquímicos. Por ello, ha sido previamente calibrado en campo mediante técnicas de regresión multilineal.
La transmisión de datos se realiza de forma inalámbrica en tiempo real mediante ZigBee. Además, los datos se almacenan localmente en caso de que no sea posible la comunicación inalámbrica. Finalmente se ha realizado una prueba de vuelo para verificar el correcto funcionamiento del sistema. Se consigue una señal estable independientemente del vuelo del dron. Además, también es posible detectar una fuente de NO2.
Desarrollo de un sistema para el control de una silla
de ruedas eléctrica mediante órdenes de voz
Primer premio ACCESING 2023
Premio al mejor proyecto de
ACCESIBILIDAD UNIVERSAL
Y DISEÑO PARA TODOS
En un mundo en constante evolución tecnológica, las necesidades de las personas con movilidad
reducida o discapacidad siguen siendo un reto persistente que requiere soluciones más eficaces y
personalizadas. A pesar de los avances significativos en los últimos años, las personas que
dependen de sillas de ruedas a menudo se encuentran con limitaciones en su autonomía e
independencia.
Actualmente, la mayoría de las sillas de ruedas en el mercado se manejan manualmente o
mediante sistemas de control electrónico, requiriendo ciertas habilidades motoras. Sin embargo,
estas soluciones presentan desventajas importantes para aquellas personas que tienen
limitaciones severas en la movilidad física. Los controles manuales requieren fuerza y resistencia
física, mientras que los controles electrónicos a menudo necesitan una coordinación y precisión
que no todo el mundo puede lograr
El proyecto propone la
adaptación de una silla de ruedas para ser controlada por la voz, buscando superar las limitaciones
actuales al proporcionar una forma de usar este medio de transporte sin requerir habilidades
motoras finas o fuerza física. En lugar de ello, la solución propuesta permitirá dirigir la silla de
ruedas utilizando comandos de voz simples y en castellano, ofreciendo una mayor independencia
y adaptabilidad.
HIDRÓN: SISTEMA DE LIMPIEZA A GRANDES ALTURAS POR MEDIO DE DRONES
Primer premio ACCESING 2024
Premio al mejor proyecto de
ACCESIBILIDAD UNIVERSAL
Y DISEÑO PARA TODOS
En la actualidad, la limpieza de fachadas representa un desafío constante para la industria de la construcción y el mantenimiento. Tradicionalmente, este proceso ha dependido en gran medida del trabajo manual realizado por personas que, equipadas con arneses y herramientas especializadas se enfrentan a alturas y condiciones peligrosas. Sin embargo, este enfoque presenta una serie de limitaciones y riesgos inherentes. El trabajo en altura conlleva peligros significativos para la seguridad de los trabajadores, incluido el riesgo de caídas y lesiones graves. Además, el acceso a áreas de difícil alcance, como aquellas situadas en lo alto de rascacielos o en estructuras de diseño complejo, puede resultar extremadamente peligroso.
Ante este panorama, surge la necesidad de explorar nuevas soluciones tecnológicas que puedan mejorar la eficiencia, la seguridad y la accesibilidad de los procesos de limpieza de fachadas. El objetivo principal de este proyecto es diseñar e implementar un sistema de limpieza basado en drones a pequeña escala que utilice agua a baja presión para mejorar la eficiencia y seguridad en el mantenimiento de fachadas
Primer premio ACCESING 2024
Premio al mejor proyecto de
ACCESIBILIDAD UNIVERSAL
Y DISEÑO PARA TODOS
En este trabajo se describe el desarrollo de un sistema de control de múltiples drones simultáneamente (enjambre de drones) con el apoyo de una interfaz gráfica. El objetivo principal del proyecto es el desarrollo de una herramienta software abierta que permita el control de un enjambre de drones de una manera fiable y fácil de manejar.
Las tareas desarrolladas para controlar el enjambre de drones son las siguientes:
La conexión de múltiples drones a una misma red.
Se ha desarrollado con éxito una interfaz gráfica que facilite al usuario el control del enjambre de drones en tiempo real.
<li Se han conseguido controlar los drones del enjambre tanto de forma independiente como en conjunto simultáneamente.
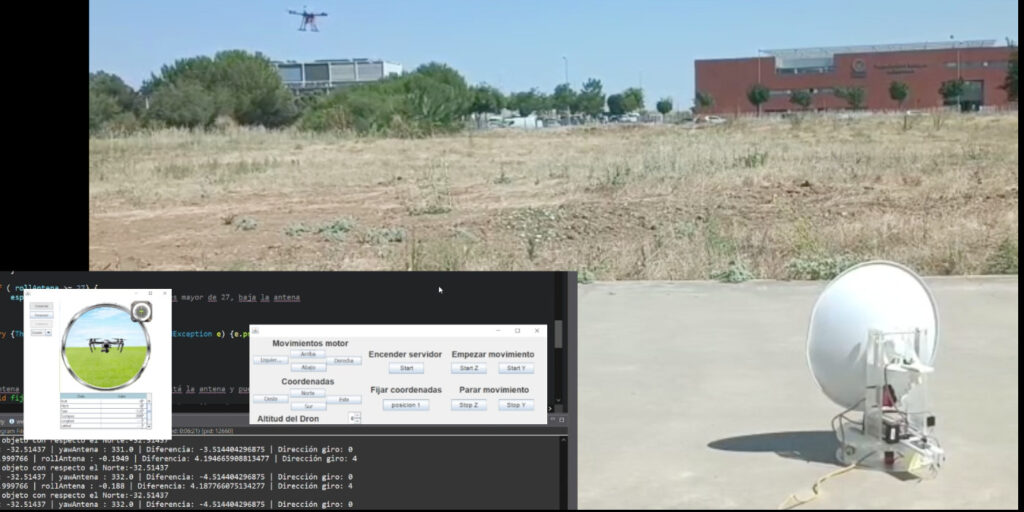
SISTEMA DE SEGUIMIENTO DE ANTENAS PARA LA COMUNICACIÓN DE DRONES
En los últimos años, el uso de drones se ha popularizado significativamente en diversos campos como la agricultura, vigilancia, inspección industrial, fotografía aérea, rescate y cartografía. Sin embargo, uno de los principales límites técnicos que restringen su aplicación práctica es el alcance de la comunicación entre el dron y la estación de control en tierra.
Este trabajo desarrolla una sistema de seguimiento de una antena que permite la comunicación con el dron hasta 50 Km. La antena se orienta automáticamente con el dron para permitir una comunicación estable en todo momento. El sistema permite mantener la alineación óptima entre la antena y el vehículo en movimiento, maximizando la calidad de la señal y minimizando las pérdidas de comunicación.
El objetivo de este trabajo ha sido desarrollar un sistema de asistencia domótica manejado con la voz parel control delos diferentes servicios domóticos de un laboratorio. Para ello, se han desarrollado las siguientes tareas:
Implementación de un sistema de reconocimiento de voz en castellano offline
Instalación y programación de sistemas inalámbricos que sirvan de actuadores para los diferentes elementos a controlar.
Construcción de un sistema de videovigilancia remoto,.
Desarrollo de una aplicación para monitorizar y controlar el laboratorio.
El objetivo principal del proyecto es desarrollar un escáner 3D funcional y económico. Para alcanzar este objetivo se han propuesto los siguientes objetivos secundarios:
Estudiar del funcionamiento del dispositivo RPLIDAR incluyendo el protocolo de comunicación
Diseñar en 3D y construir el mecanismo físico
Desarrollar la electrónica: configurar los componentes electrónicos, realizar las conexiones entre los mismos y proporcionar potencia al sistema.
Desarrollar el programa que ejecuta el microcontrolador.
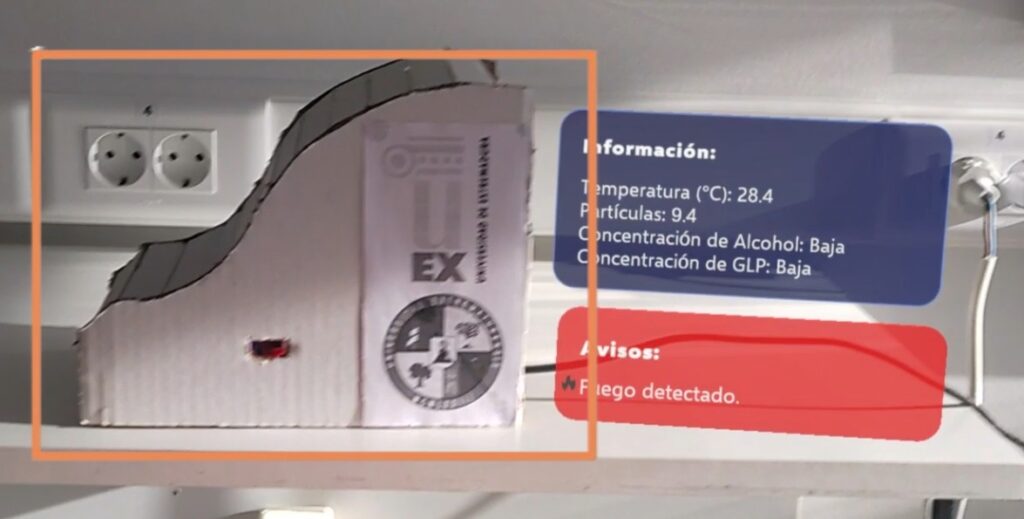
En la actualidad se están incorporando nuevos tipos de dispositivos para mejorar la monitorización y control de los procesos en la industria. La realidad mixta es una nueva tecnología que puede ofrecer grandes ventajas en este entorno, ya que combina el mundo real y el virtual, permitiendo la interacción simultánea de objetos físicos y digitales en tiempo real.
El objetivo principal de este trabajo es desarrollar un sistema de monitorización y control de un entorno industrial mediante el uso de Realidad Mixta.
SISTEMA SALVAVIDAS
AUTOPROPULSADO GUIADO POR CONTROL
REMOTO
Segundo premio ACCESING 2025
Premio al mejor proyecto de
ACCESIBILIDAD UNIVERSAL
Y DISEÑO PARA TODOS
Los métodos convencionales de salvamento son herramientas fundamentales que se han usado por décadas para el salvamento en situaciones de emergencia acuáticas.
Sin embargo, cuando las condiciones son adversas o el lugar donde se encuentra la persona en peligro es de difícil acceso, la tarea de salvamento se hace muy complicada y puede poner en peligro incluso la vida de los rescatadores.
Para solucionar estos problemas, este proyecto ha desarrollado un sistema de salvamento que permite dirigir un salvavidas por control remoto. Este novedoso sistema permitirá rescatar personas en riesgo de ahogamiento y podrá ser utilizado en aquellas situaciones en las que los sistemas de rescate actuales no pueden ser utilizados.
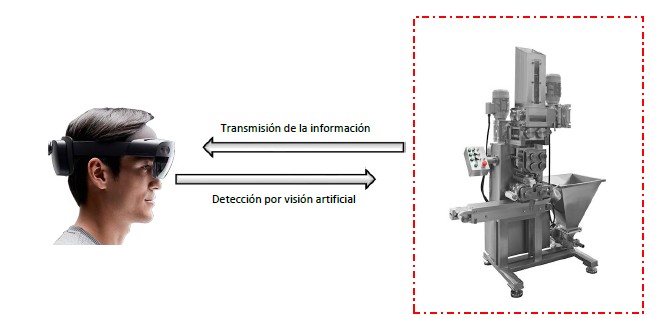
Sistema de reconocimiento y monitorización de máquinas mediante unas gafas de realidad mixta
La visión artificial tiene un papel cada vez más central en la industria actual, debido al gran avance en algoritmos de aprendizaje profundo (“Deep learning”), sensores de alta resolución y la mayor capacidad de computación de borde (o “Edge computing”) en las fábricas y líneas de producción se están incorporando sistemas de visión para una gran variedad de tareas
Este proyecto representa una convergencia de visión por computador, realidad mixta y procesamiento en tiempo real, ofreciendo una herramienta innovadora que aprovecha los dispositivos de realidad mixta para la detección y visualización de objetos en el entorno inmediato.
SISTEMA DE RECONOCIMIENTO FACIAL PARA LA APERTURA AUTOMÁTICA DE PUERTAS
Primer premio ACCESING 2025
Premio al mejor proyecto de
ACCESIBILIDAD UNIVERSAL
Y DISEÑO PARA TODOS
El objetivo principal de este trabajo es el desarrollo de un sistema tanto software como hardware que permita el acceso a una estancia utilizando técnicas de reconocimiento facial. Para desarrollar este sistema, se ha desarrollo de un programa que permita reconocer los rostros de las personas.
Además, se ha creado una aplicación software para realizar el reconocimiento de una persona y autorizarle el acceso. También se ha desarrollado una aplicación software para el mantenimiento de los usuarios, permitiendo añadir nuevos usuarios autorizados de una manera automática. Finalmente, se ha instalado el sistema completo en el laboratorio de Vehículos Aéreos no Tripulados de la Escuela de Ingenierías Industriales de la Universidad de Extremadura.